深度学习的学习笔记04
本次的主题是ResNet+ResNeXt
论文阅读与视频学习
Deep Residual Learning for Image Recognition,CVPR2016
神经网络的深度非常重要,很多模型都已经达到了很深的深度。但是过深的神经网络会带来
- 梯度消失,梯度爆炸的问题。可以通过归一化神经化与中间归一化层来解决。
- 退化问题:随着网络深度的增加,准确度变得饱和,然后迅速退化。这种过拟合不是由过拟合引起的,添加更多的层会导致更高的训练误差。
为了解决退化的问题,引入了残差学习框架。
残差神经网络的特点:
- 即使当网络很深时,也可以很容易的被优化。(普通的网络会在深度增加时,训练误差也会增加)
- 残差神经网络可以很轻松的从深度增加中得到准确率,从而效果比浅层的更好。
准备工作:
- 残差表示:VLAD 是一种由残差向量相对于字典进行编码的表示,而 Fisher Vector 可以表述为 VLAD 的概率版本。已经被证明比编码原始向量更有效。此外,使用预处理也可以更好的简化优化。
- Shortcut 连接:一个
inception层由一个shortcut与一些更深的网络层构成。在训练时,即使当网络层的输出接近于 0,下一个inception层依然可以通过shortcut的值进行学习。虽然这种方式可以训练极深的网络,但是准确率不会无限提高,比如超过 100 层后。
深度残差学习
残差学习
假设 $H(x)$ 为希望通过几层神经网络来拟合的函数,x 为输入。同时,多个非线性层可以渐近地逼近复杂的函数。
如果 $H(x)$ 与输入的 $x$ 的维度相同,那么可以让神经网络层逼近残差函数 $H(x)-x$。令 $F(x)=H(x)-x$,即:让神经网络逼近 $F(x)$。此时,$H(x)$ 可以表示为 $F(x)+x$,即:经过神经网络的结果加上输入的值。虽然这两种形式在理论上都可以逼近所需的函数,但是学习的难易程度可能不同。
退化问题指的是随着网络层数增加,模型的训练误差不降反升,而理论上如果新增的层可以构造成恒等映射,更深的模型的训练误差不应大于较浅模型的训练误差,但求解器在通过多个非线性层逼近恒等映射时可能会遇到困难,因此通过残差学习的重新表述可以有助于处理这种问题。
Shortcut 的种类
- 使用零填充捷径来增加维度
- 使用投影捷径来增加维度
- 所有的捷径都是投影捷径
区别:
- 效果:
3 > 2 > 1 - 内存使用:
3 > 2 > 1
使用捷径有助于训练,3种类型的捷径的区别不大,并且都会比不使用捷径的效果好。
恒等捷径是指直接将输入传递到输出,而不进行任何变换或参数调整。在上面的三种捷径的种类中,配置 1 和配置 2 中的一部分,用于那些不需要增加维度的连接。
网络结构
左侧的为 18 层,34 层,50 层的网络使用的结构,为了减少参数,设计了右侧的结构。右侧的结构通过先降维后升维的方式,使得神经网络的参数减少,最终使得神经网络的训练时间控制在可以接受的时间范围内。
实验对比
通过 vgg19,普通卷积网络, 残差神经网络 的对比,可以得出:
- 对于普通网络,越深的网络,训练误差越大
- 对于残差网络,越深的网络,精度越高
- 残差网络可以在参数量很少的情况下精度胜过
vgg19
以上总结:残差网络打赢了当时大部分网络,是更好的一种网络模型
后续使用了 1202 层的残差神经网络,来探究极限,发现出现了可能是过拟合的情况。’
ResNet视频学习
ResNet网络简介
普通网络中存在的问题
- 梯度消失或梯度爆炸
- 退化问题(degradation problem)
解决梯度问题的一般方式:
- 对数据进行标准化处理
- 权重初始化
- batch normalization 处理
解决退化问题:
- 残差结构
ResNet 的特点
- 超深的网络结构(超 1000 层)
- 提出 residual 模块
- 使用 Batch Normalization 加速训练
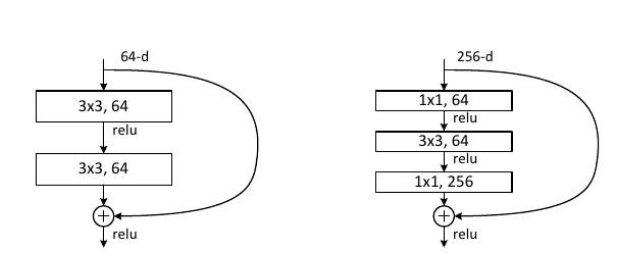
BasicBlock
主分支的输出特征矩阵的高宽,通道要与输入特征矩阵的高宽,通道都保持一致。这两个要相加。
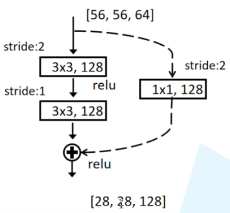
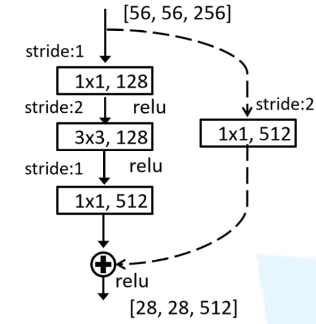
对于每个模块的第一层网络,由于该网络要将输入的尺寸改变(通过将 stride 设置为2 来使得高与宽变为原来的一半),所以 shortcut 处要对输入的数据也做相应的变换,这样才可以与主分支相加。
Bottleneck Block
- 最上面的卷积层用于降维
- 最下面的卷积层用于升维
这种结构的特点是,初始的结构,参数降低了约一半。
- 原理与上文一致
Batch Normalization
- 目的是使一批
batch的feature map满足均值为 0,方差为 1 的分布规律。原因:虽然图像经过了预处理以后,可以满足某一个分布规律,但是经过卷积层以后,得出的feature map则不一定满足这个分布规律。
可以加速网络的收敛并且提升准确率。
使用 BN 时需要注意的问题
- 训练时要将
training参数设置为True,在验证时将training参数设置为False。在 pytorch 中可以通过创建模型的model.train()和model.eval()方法控制。 batch size尽可能设置大点,设置小后表现可能很糟糕,设置的越大求的均值和方差越接近整个训练集的均值与方差- 建议将 bn 层放在卷积层和激活层之间,肯卷积层不要使用偏置 bias(即使使用了,经过 bn 层以后也不会起效果)。
迁移学习简介
优点:
- 可以快速训练出一个理想的结果
- 当数据集较小时也可以训练出理想的效果
- 使用别人预训练的模型参数时,也要注意别人的预处理的方式
常见的迁移学习的方式:
- 载入权重后训练所有参数
- 载入权重后只训练最后几层参数
- 载入权重后在原网络基础上再添加一层全连接层
Aggregated Residual Transformations for Deep Neural Networks, CVPR 2017
网络准确度的提升可以像 VGG 一样,通过堆叠相同的模块来实现,也可以像 Inception 一样,通过拆分,转换,合并的方式来实现。这个网络通过结合这两种方法来实现了更进一步的准确度的提升。这种方式实现了在保持(或降低)复杂度的同时提高准确度。
ResNeXt 的核心是使用分组卷积来构建一个网络层。通过使用分组卷积来结合 Inception 的拆分,转换,合并的网络构建思想,然后再通过堆叠相同的模块来结合 VGG 的思想。
论文中定义了一个名词 cardinality,描述分组卷积中,组数的数量。实验中证明了,增加 cardinality 会比增加网络的深度与广度对准确度更有效果,尤其是出现退化问题的时候。而 cardinality 是一个具体的,可以测量的量。
改进过程:
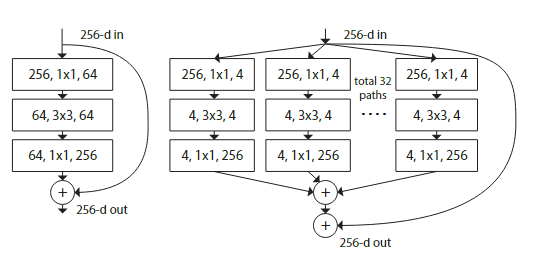
左侧是 ResNet 的模块,而右侧是最初的 ResNeXt 的模块。这两者有着几乎相同的计算量。
而为了简化左侧模块的计算量,可以在数学上做一个等价变形:
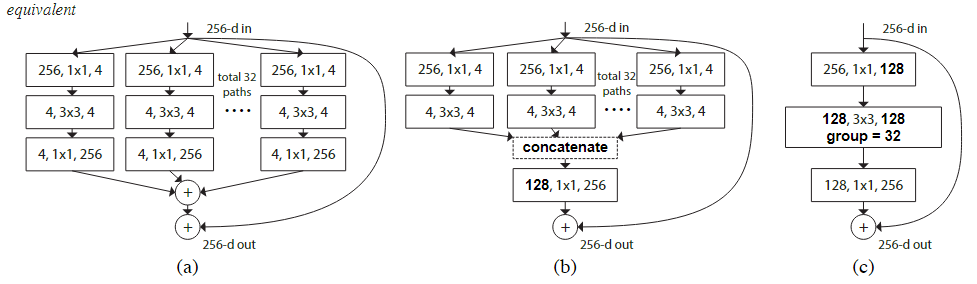
- 32 组的
4, 1*1, 256的卷积后连接可以转换为先对中间层的结果进行拼接后再使用一个128, 1*1, 256的卷积。 - 32 组的
256, 1*1, 4可以等价成一个256, 1*1, 128,而 32 组的4, 3*3, 4可以等价成一个128, 3*3, 128, group=32
这种等价变换的关键在于分组卷积的特性,它允许将一个大的卷积操作分解成多个小的、独立的卷积操作,每个操作只在自己的通道组内进行。这样,可以在不改变模型计算复杂度的情况下,增加模型的 cardinality,从而提高模型的表示能力。这种特点只有当网络块具有足够的深度时才可以体现出来:此时,分组卷积才可以形成多个独立的,并行的变换路径,从而增加模型的复杂性与多样性。
分组大小选择 32 的原因:
- 模型有足够的复杂性来捕捉数据中的模式
- 当大于 32 时,对于模型的准确度提升不大,但是训练花费的时间却大幅增加
课后作业
代码作业
以下分别是LeNet网络与ResNet网络的模型
LeNet网络
1 | # 使用类似于LeNet 的网络来分类猫与狗 |
ResNet网络
1 | class BasicNetBlock(nn.Module): |
电脑的显存就只有6g,没法搭建太大的网络。经过比赛方给出的训练集,经过20轮的训练,最终成绩分别是81.95与84.45。
项目地址:https://github.com/ghost-him/study/tree/main/catvsdog
思考题
Residual learning 的基本原理?
在传统的深度神经网络中,通常是将一层的输出直接作为下一层的输入。而在残差神经网络中,每一层的输出是由该层的输入与该层学习到的残差的和。可以通过$y=F(x,{W_{i}})+x$表示。$x$为输入,$F(x,{W_{i}})$为学习的残差映射,${W_{i}}$为学习参数,$y$为输出。特点是由多个残差块组成,而一个残差块包含2个或3个卷积层,还有一个跳跃连接。
Batch Normalization 的原理,思考 BN、LN、IN 的主要区别。
BN层是用于手动将每一层的输出进行归一化处理,将输出调整为均值为0,标准差为1的正太分布。
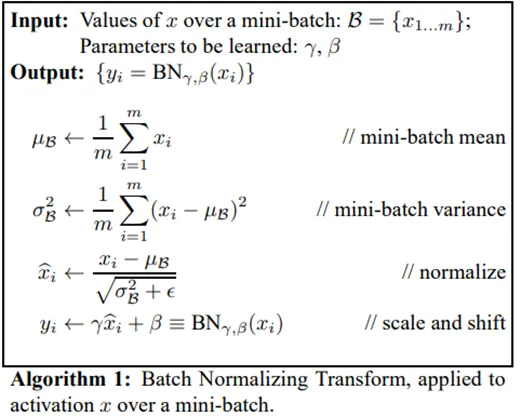
BN的具体步骤如下:
- 计算均值
- 计算方差
- 归一化
- 缩放与平移(这里设置了两个可以学习的参数:$\gamma$与$\beta$,作用分别是控制缩放与平移)
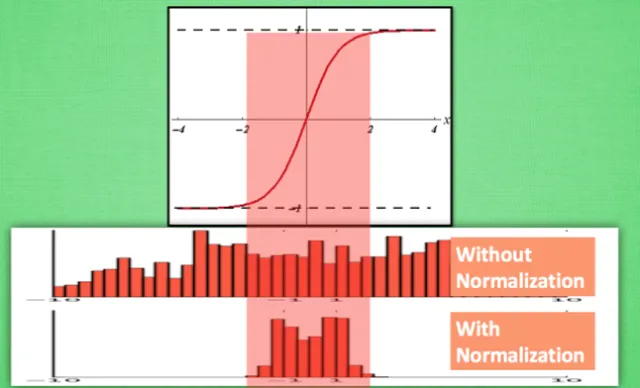
可以从以下图看到,使用BN层以后,可以减少大量的浪费的数据(以sigmoid函数为例)
- BN是在一个批次的数据上进行归一化,它计算每个特征维度在所有样本上的均值和方差。通常用于卷积神经网络的中间层。
- LN是在每个样本上进行归一化,即对每个样本的所有特征维度计算均值和方差。适用于循环神经网络和Transformer模型。
- IN是在每个样本的每个特征维度上进行归一化,即对每个样本的每个特征计算均值和方差。主要用于风格迁移等图像处理任务。
BN与IN:如果对一个图像进行归一化处理,则BN会计算整个批次中所有图像的红色通道的均值和方差,然后使用这些统计量来归一化批次中所有图像的红色通道的像素值。而IN则是分别计算每个颜色通道的均值和方差,然后使用这些统计量来归一化该通道的所有像素值。
为什么分组卷积可以提升准确率?既然分组卷积可以提升准确率,同时还能降低计算量,分组数量尽量多不行吗?
分组卷积允许每个组专注于不同的特征子空间,这种操作可以使模型更好的捕捉到多样化的特征信息。可以在不改变模型的计算复杂度的情况下,显著提升模型的表现。
分组数量过多时,对准确率的提升几乎没有作用,同时还会大幅度增加模型的训练时间,因此不可以过多。比如:当在32组的基础上再增加32组,准确率可能只会提升0.1%,但是训练花费的时候却可能增加50%。
附加题
Res2Net
模型改进
Res2Net改进了ResNet的残差块的结构,从而实现了多尺度卷积。
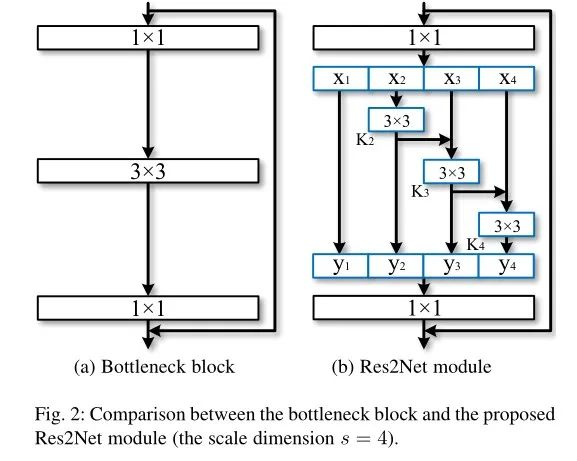
上图将一个输入的数据分成了 4 份(在实际的操作过程中也可以将其分成多份)。以 $x_{2}$ 为数据为例:该数据经历了 1 个 3*3(y2),一个 2 份 3*3(y3),一个 3 份 3*3(y4),其特征表示一定会比左侧只有一个 3*3 的卷积好。
这种结构的设计实现了多尺度的卷积:小的感受野可能会看到更多的物体的细节,对于检测小目标有很大的好处;而大的感受野可以感受物体的整体结构,方便网络定位物体的位置,细节与位置的结合可以更好的得到具有清晰边界的物体信息。
比较 multi-head 和 分组卷积 的区别与联系
联系:它们都是将一个整体拆分成了多个独立的子空间,然后在子空间中独立的计算,最后再拼接起来,并进行线性变换。它们都可以通过减少计算量来提高效率。
区别:multi-head主要用于NLP领域的自注意力机制(self-attention)中,而分组卷积主要用于CNN中。